Generic (but slow) Serial Driver using an LED instead of TX and RX wires. More...
Functions | |
| void | ldInit (void) |
| LEDComm Driver initialization. More... | |
| void | ldObjectInit (LEDCommDriver_t *ldp, qnotify_t inotify, qnotify_t onotify) |
| Initializes a generic full duplex driver object. More... | |
| void | ldStart (LEDCommDriver_t *ldp, const LEDCommConfig_t *config) |
| Configures and starts the driver. More... | |
| void | ldStop (LEDCommDriver_t *ldp) |
| Stops the driver. More... | |
| void | ldIncomingDataI (LEDCommDriver_t *ldp, uint8_t b) |
| Handles incoming data. More... | |
| msg_t | ldRequestDataI (LEDCommDriver_t *ldp) |
| Handles outgoing data. More... | |
LEDComm status flags | |
| #define | LD_PARITY_ERROR 32 |
| Parity error happened. More... | |
| #define | LD_FRAMING_ERROR 64 |
| Framing error happened. More... | |
| #define | LD_OVERRUN_ERROR 128 |
| Overflow happened. More... | |
| #define | LD_LINK_UP 256 |
| Link detected. More... | |
| #define | LD_LINK_DOWN 512 |
| No link detected. More... | |
Detailed Description
Generic (but slow) Serial Driver using an LED instead of TX and RX wires.
This module implements a generic half duplex serial driver that uses an LED instead of TX and RX wires. The driver implements a SerialDriver interface and uses I/O Queues for communication. Event flags are used to notify the application about incoming data, outgoing data and other I/O events.
- Precondition
- In order to use the LEDComm driver the source code must be extracted in the
$(CHIBIOS)/extdirectory. The projectMakefilemust be modified by adding$(CHIBIOS)/ext/ledcomm-X.Y.Z/ledcomm.cto theCSRCvariable and$(CHIBIOS)/ext/ledcomm-X.Y.ZINCDIRvariable.
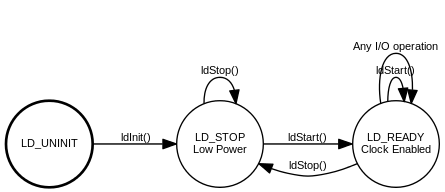
Driver State Machine
The driver implements a state machine internally, not all the driver functionalities can be used in any moment, any transition not explicitly shown in the following diagram has to be considered an error and shall be captured by an assertion (if enabled).
Macro Definition Documentation
| #define LD_OVERRUN_ERROR 128 |
Function Documentation
| void ldInit | ( | void | ) |
LEDComm Driver initialization.
- Note
- This function is NOT implicitly invoked by
halInit(), you must explicitly initialize the driver.
- Function Class:
- Initializer, this function just initializes an object and can be invoked before the kernel is initialized.
Definition at line 296 of file ledcomm.c.
References ldObjectInit().

| void ldObjectInit | ( | LEDCommDriver_t * | ldp, |
| qnotify_t | inotify, | ||
| qnotify_t | onotify | ||
| ) |
Initializes a generic full duplex driver object.
The HW dependent part of the initialization has to be performed outside, usually in the hardware initialization code.
- Parameters
-
[out] ldp pointer to a LEDCommDriverstructure[in] inotify pointer to a callback function that is invoked when some data is read from the Queue. The value can be NULL.[in] onotify pointer to a callback function that is invoked when some data is written in the Queue. The value can be NULL.
- Function Class:
- Initializer, this function just initializes an object and can be invoked before the kernel is initialized.
Definition at line 322 of file ledcomm.c.
References LD_STOP, LEDCOMM_BUFFERS_SIZE, and LEDCommDriver::vmt.
Referenced by ldInit().
| void ldStart | ( | LEDCommDriver_t * | ldp, |
| const LEDCommConfig_t * | config | ||
| ) |
Configures and starts the driver.
- Parameters
-
[in] ldp pointer to a LEDCommDriverobject[in] config the architecture-dependent LEDComm driver configuration. If this parameter is set to NULLthen a default configuration is used.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 341 of file ledcomm.c.
References LEDCommConfig_t::anode_pad, LEDCommConfig_t::anode_port, LEDCommConfig_t::cathode_extmode, LEDCommConfig_t::cathode_pad, LEDCommConfig_t::cathode_port, LEDCommConfig_t::data_bits, LD_READY, LD_STOP, LEDCOMM_DATA_BITS7, LEDCOMM_DEFAULT_SYNCS, and LEDCommConfig_t::threshold.
| void ldStop | ( | LEDCommDriver_t * | ldp | ) |
Stops the driver.
Any thread waiting on the driver's queues will be awakened with the message Q_RESET.
- Parameters
-
[in] ldp pointer to a LEDCommDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| void ldIncomingDataI | ( | LEDCommDriver_t * | ldp, |
| uint8_t | b | ||
| ) |
Handles incoming data.
This function must be called from the input interrupt service routine in order to enqueue incoming data and generate the related events.
- Note
- The incoming data event is only generated when the input queue becomes non-empty.
- In order to gain some performance it is suggested to not use this function directly but copy this code directly into the interrupt service routine.
- Parameters
-
[in] ldp pointer to a LEDCommDriverstructure[in] b the byte to be written in the driver's Input Queue
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 445 of file ledcomm.c.
References LD_OVERRUN_ERROR.
| msg_t ldRequestDataI | ( | LEDCommDriver_t * | ldp | ) |
Handles outgoing data.
Must be called from the output interrupt service routine in order to get the next byte to be transmitted.
- Note
- In order to gain some performance it is suggested to not use this function directly but copy this code directly into the interrupt service routine.
- Parameters
-
[in] ldp pointer to a LEDCommDriverstructure
- Returns
- The byte value read from the driver's output queue.
- Return values
-
Q_EMPTY if the queue is empty (the lower driver usually disables the interrupt source when this happens).
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
